Блок управления двигателем постоянного тока схема. Блоки управления электродвигателями постоянного тока
Наиболее простой метод регулирования скорости вращения двигателя постоянного тока основан на использовании широтно-импульсной модуляции (ШИМ или PWM). Суть этого метода заключается в том, что напряжение питания подается на двигатель в виде импульсов. При этом частота следования импульсов остается постоянной, а их длительность может меняться.
ШИМ сигнал характеризуется таким параметром как коэффициент заполнения или Duty cycle. Это величина обратная скважности и равна отношению длительности импульса к его периоду.
D = (t/T) * 100%
На рисунках ниже изображены ШИМ сигналы с различными коэффициентами заполнения.
При таком методе управления скорость вращения двигателя будет пропорциональна коэффициенту заполнения ШИМ сигнала.
Простая схема управления двигателем постоянного тока
Простейшая схема управления двигателем постоянного тока состоит из полевого транзистора, на затвор которого подается ШИМ сигнал. Транзистор в данной схеме выполняет роль электронного ключа, коммутирующего один из выводов двигателя на землю. Транзистор открывается на момент длительности импульса.

Как будет вести себя двигатель в таком включении? Если частота ШИМ сигнала будет низкой (единицы Гц), то двигатель будет поворачиваться рывками. Это будет особенно заметно при маленьком коэффициенте заполнения ШИМ сигнала.
При частоте в сотни Гц мотор будет вращаться непрерывно и его скорость вращения будет изменяться пропорционально коэффициенту заполнения. Грубо говоря, двигатель будет "воспринимать" среднее значение подводимой к нему энергии.
Схема для генерации ШИМ сигнала
Существует много схем для генерации ШИМ сигнала. Одна из самых простых - это схема на основе 555-го таймера. Она требует минимум компонентов, не нуждается в настройке и собирается за один час.
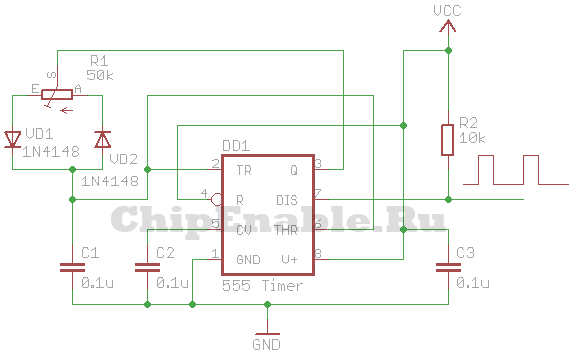
Напряжение питания схемы VCC может быть в диапазоне 5 - 16 Вольт. В качестве диодов VD1 - VD3 можно взять практически любые диоды.
Если интересно разобраться, как работает эта схема, нужно обратиться к блок схеме 555-го таймера. Таймер состоит из делителя напряжения, двух компараторов, триггера, ключа с открытым коллектором и выходного буфера.

Вывод питания (VCC) и сброса (Reset) у нас заведены на плюс питания, допустим, +5 В, а земляной (GND) на минус. Открытый коллектор транзистора (вывод DISCH) подтянут к плюсу питания через резистор и с него снимается ШИМ сигнал. Вывод CONT не используется, к нему подключен конденсатор. Выводы компараторов THRES и TRIG объединены и подключены к RC цепочке, состоящей из переменного резистора, двух диодов и конденсатора. Средний вывод переменного резистора подключен к выводу OUT. Крайние выводы резистора подключены через диоды к конденсатору, который вторым выводом подключен к земле. Благодаря такому включению диодов, конденсатор заряжается через одну часть переменного резистора, а разряжается через другую.
В момент включения питания на выводе OUT низкий логический уровень, тогда на выводах THRES и TRIG, благодаря диоду VD2, тоже будет низкий уровень. Верхний компаратор переключит выход в ноль, а нижний в единицу. На выходе триггера установится нулевой уровень (потому что у него инвертор на выходе), транзисторный ключ закроется, а на выводе OUT установиться высокий уровень (потому что у него на инвертор на входе). Далее конденсатор С3 начнет заряжаться через диод VD1. Когда она зарядится до определенного уровня, нижний компаратор переключится в ноль, а затем верхний компаратор переключит выход в единицу. На выходе триггера установится единичный уровень, транзисторный ключ откроется, а на выводе OUT установится низкий уровень. Конденсатор C3 начнет разряжаться через диод VD2, до тех пор, пока полностью не разрядится и компараторы не переключат триггер в другое состояние. Далее цикл будет повторяться.
Приблизительную частоту ШИМ сигнала, формируемого этой схемой, можно рассчитать по следующей формуле:
F = 1.44/(R1*C1), [Гц]
где R1 в омах, C1 в фарадах.
При номиналах указанных на схеме выше, частота ШИМ сигнала будет равна:
F = 1.44/(50000*0.0000001) = 288 Гц.
ШИМ регулятор оборотов двигателя постоянного тока
Объединим две представленные выше схемы, и мы получим простую схему регулятора оборотов двигателя постоянного тока, которую можно применить для управления оборотами двигателя игрушки, робота, микродрели и т.д.
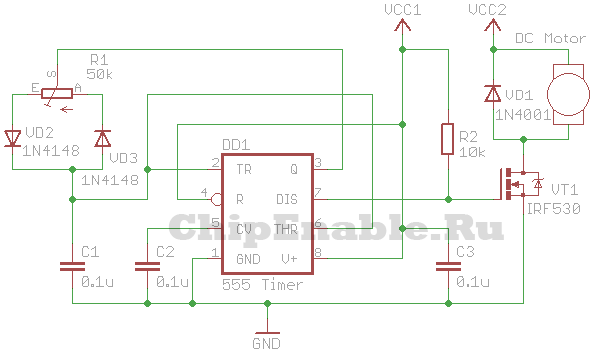
VT1 - полевой транзистор n-типа, способный выдерживать максимальный ток двигателя при заданном напряжении и нагрузке на валу. VCC1 от 5 до 16 В, VCC2 больше или равно VCC1.
Вместо полевого транзистора можно использовать биполярный n-p-n транзистор, транзистор дарлингтона, оптореле соответствующей мощности.
: Важнейший станок "деревянного" моделиста .
Прежде всего - для чего это нужно. Почти у каждого моделиста имеется самодельный или промышленный электроинструмент с приводом от коллекторного двигателя постоянного тока. При этом обычно такой инструмент не имеет регулятора оборотов или имеется простейшая ступенчатая регулировка. Не буду лишний раз доказывать, что наличие регулятора оборотов в электроинструменте позволяет оптимально подобрать режим для каждой операции, особенно при использовании различных насадок. Кроме того, моделисты часто используют низковольтные нагреватели - паяльники, приспособления для гибки деревянных реек и т. п. При этом с помощью регулятора можно получить оптимальную температуру нагревателя. Моделисту иногда приходится наносить гальванические покрытия, для чего необходим регулируемый источник постоянного тока. Все эти функции способно выполнить устройство, описанное ниже.
При конструировании бормашины встал вопрос о выборе схемы регулятора оборотов. Реостатные схемы регулирования скорости вращения коллекторных двигателей постоянного тока, в том числе с применением силовых транзисторов, на которых падает часть напряжения, обладают низким КПД при малых и средних оборотах. На балластных транзисторных ключах рассеивается значительная тепловая мощность, что ужесточает требования к системе их охлаждения. Поэтому выбор системы регулирования скорости вращения пал на импульсные схемы с изменением ширины прямоугольных импульсов напряжения, подаваемых на обмотку двигателя (широтно-импульсная модуляция - ШИМ). Принцип ШИМ заключается в следующем: напряжение в нагрузку подается импульсами постоянной амплитуды, причем соотношение между шириной импульса и паузы (скважность) регулируется, что эквивалентно изменению напряжения питания на нагрузке. Достоинством этой схемы является ее высокая экономичность и надежность. Управляющий нагрузкой транзистор бывает только либо полностью включен, либо выключен, поэтому он практически не нагревается и его можно устанавливать без теплоотвода.
После анализа различных регуляторов качестве базовой была выбрана схема, опубликованная в журнале (№4/2001., перепечатка из "Hobby Elektronika" №7/01, автор Иштван Кекеш). Регулятор (см.схему) содержит задающий генератор напряжения треугольной формы частотой 2кГц (DA1.1, DA1.4), электронный ключ VT1 и регулятор скважности (DA1.2, DA1.3, R8). На рисунке ниже показаны графики напряжений в типовых точках схемы.
Здесь синим цветом показано напряжение на выходе генератора треугольного напряжения (вывод 1 DA1), красным - напряжение регулировки оборотов с потенциометра R8, зеленым - напряжение на двигателе. Очень наглядно видно, что включение и выключение напряжения на нагрузке происходит в момент совпадения напряжения задающего генератора и напряжения на регулирующем потенциометре. Чем выше управляющее напряжение, тем шире импульс на нагрузке.
В схеме предусмотрена возможность включения двигателя с помощью ножной педали SA2. В моем варианте в качестве педали работает обыкновенный короткоходовый концевой выключатель с нормально замкнутыми контактами (в народе -), лежащий на полу. При выключенном SA1 двигатель работает постоянно, при включенном - только при нажатии на педаль. Благодаря наличию конденсатора C2 пуск двигателя осуществляется плавно, что иногда может быть полезно (при указанной емкости C2 примерно за 1 сек.). Переключатель SA4 служит для реверсирования двигателя. Диод D3 стабилизирует питание регулятора. Питание осуществляется через понижающий трансформатор TV1 и выпрямитель D4. Параметры трансформатора зависят от примененного электродвигателя. В первом приближении напряжение вторичной обмотки трансформатора должно быть равно номинальному напряжению электродвигателя плюс 5 вольт, падающих на выпрямителе и ключевом транзисторе. Для возможности работы в форсированном режиме можно добавить еще процентов 20-30. Расчетный ток вторичной обмотки трансформатора, диодов выпрямителя и ключевого транзистора должны быть больше, чем ток, потребляемый электродвигателем, причем для надежности работы лучше дать запас в 3-5 раз. При напряжении питания менее 20В диод D3 можно исключить. Напряжения, указанные на схеме, соответствуют двигателю 27В 30 Вт.
Большинство элементов схемы смонтировано на печатной плате размером 65Х40 мм. (более тонкой линией показана перемычка) Плата установлена в корпусе на двух трубчатых стойках с винтами М2,5 (см. также схему расположения элементов и шаблон для сверления отверстий). Внутри корпуса смонтированы трансформатор, конденсатор С4, выпрямитель D4. Регулятор оборотов R8, переключатели и разъемы для подключения двигателя и педали смонтированы на лицевой панели, резисторы R13 И R14 смонтированы на R8.
В качестве DA1 можно применить любой универсальный счетверенный операционный усилитель. В оригинале были указаны TL064, TL075, TL084, я применил LM324. Ключевой транзистор применен КТ829А (100В, 8А), для более мощных двигателей можно применить КТ827А (100В, 20А). Диоды D1 и D2 защищают VT1 от выбросов напряжения на индуктивной нагрузке.
При налаживании R13 и R14 не устанавливают, провода от платы припаивают прямо к R8. При правильном монтаже и исправных деталях схема начинает работать сразу. Вращением R8 проверяют регулировку оборотов от нуля до максимума. Если последние не совпадают с крайними положениями R8, необходимо подобрать R13 и R14, чтобы максимум и минимум совпали с крайними положениями регулятора. Возможен вариант, когда схема не будет работать из-за того, что не запускается задающий генератор. В этом случае можно попробовать немного увеличить номинал R4. Для изменения времени плавного пуска можно изменять емкость C2.
В заключение хочу отметить, что потратив всего около $10 и немного свободного времени, можно значительно улучшить характеристики своего электроинструмента. Все вопросы по изготовлению и наладке данного устройства задавайте в
Чтобы двигатель постоянного тока начал вращаться, ему необходимо обеспечить нужное количество энергии. Как правило, для маломощных двигателей достаточно несколько ватт. Блок управления (микроконтроллер), который принимает решения о запуске двигателя, не может непосредственно управлять двигателем, то есть обеспечить необходимую мощность со своего вывода. Это связано с тем, что порты микроконтроллера имеют очень ограниченную нагрузочную способность (максимальный ток на выходе микроконтроллера обычно не более 20 мА).
Поэтому нужен усилитель мощности — устройство, которое может на своем выходе генерировать сигнал мощностью большей, чем мощность на его входе. Такими устройствами являются транзистор и реле, которые прекрасно подходят для управления двигателем постоянного тока.
Самый простой способ приведения в действие двигателя показан ниже:
Управление шаговым двигателем
Шаговые двигатели, так же как и коллекторные, состоят в основном из катушек. То есть для вращения нужно пропустить ток через катушки. Таким образом, все из представленных схем управления двигателями могут быть использованы и для . (все, кроме H-моста)
Разница в схеме усилителя мощности для шаговых двигателей заключается в том, что здесь немного другие напряжения и токи, и также в основном требуется 4 переключателя на один двигатель (когда двигатель имеет пять контактов).
Номинальное рабочее напряжение, в основном, находится в диапазоне 9 — 24 В. При таких не малых напряжениях мы имеем дело также с большим током: 0,3 — 1A на одну фазу! Ниже приведен пример подключения шагового двигателя с 5 выводами:

В роли ключей мы можем также использовать MOSFET — транзисторы. Это даже более простое решение.
Так как нам нужно до 4-х транзисторов, которые занимают довольно много места на плате, хорошим решением будет использовать микросхему .
В настоящее время двигатели постоянного тока нашли широкое применение в различных отраслях промышленности. Двигатели постоянного тока используются там, где требуется плавное и точное регулирование скорости и вращающего момента в широких пределах. В этой статье я расскажу о создании блока управления для двигателя постоянного тока, который позволял бы изменять частоту вращения вала двигателя и стабилизировал обороты на определенном уровне, вне зависимости от нагрузки на валу двигателя.
В основе разработки положен принцип работы следящего привода с одноконтурной системой регулирования.
Блок управления состоит из следующих узлов:
- СИФУ (Система Импульсно - Фазового Управления)
- Регулятор
- Защита
Принципиальная схема привода приведена ниже.
Крупнее
Рассмотрим схему поподробнее.
Итак, СИФУ (Система Импульсно - Фазового Управления) - преобразует синусоидальное напряжение сети в серию прямоугольных импульсов, идущих на управляющие электроды силовых тиристоров. При включении блока управления переменное напряжение величиной 14-16в поступает на мостовой выпрямитель D1, где преобразуется в пульсирующее напряжение, служащее не только для питания схемы, но и для синхронизации работы привода. Диод D2 препятствует сглаживанию импульсов конденсатором С1. Далее импульсы поступают на «детектор нуля» - DA1.1, собранного на одном ОУ микросхемы LM324, работающего в режиме компаратора. Пока нет импульса, напряжения на прямом и инверсном входах примерно равны и компаратор находиться в сбалансированном состоянии. При прохождении фазы через «0», на инверсном входе компаратора DA1.1 играющего роль «детектора нуля» появляются импульсы, переключающие компаратор, в результате чего на выходе DA1.1 вырабатываются прямоугольные синхроимпульсы, период следования которых жестко привязан к похождению фазы через «0».
Ниже представлены осциллограммы, поясняющие принцип работы. 
Сверху вниз: КТ1, КТ2, КТ3.
Схема была просимулированна в программе Multisim 11. Вот файл проекта . Можно скачать, запустить и посмотреть как работает данный узел.
Далее синхроимпульсы поступают на интегратор с транзисторным ключом (С4, Q1), где и вырабатывается пилообразное напряжение. В момент прохождения фазы через «0» синхроимпульс открывает транзистор Q1, который разряжает конденсатор С4. После спада импульса транзистор закрывается и происходит заряд конденсатора до прихода следующего синхроимпульса, в результате чего на коллекторе Q1 (осцил. КТ4). формируется линейно нарастающее пилообразное напряжение, стабилизированное генератором стабильного тока выполненного на полевом транзисторе T1. Амплитуда „пилы“ равное 9в выставляется подстроечным резистором RP1. Напряжение „пилы“ поступает на прямой вход компаратора DA1.2.
Напряжение задания поступает на инверсный вход компаратора DA1.2 и в момент, когда пилообразное напряжение превышает величину напряжения на инверсном входе компаратора, компаратор переключиться и на выходе компаратора формируется импульс (осцил. КТ4). Импульс дифференцируется через цепочку R14, C6 и поступает на базу транзистора Q2. Транзистор открывается и на импульсном трансформаторе Tr1 формируются импульсы открытия силовых тиристоров. Увеличивая (уменьшая) напряжение задания, меняется скважность импульсов в КТ5.
Вот осциллограммы. 
Но никаких импульсов в КТ5 мы не увидим до тех пор, пока не нажмем кнопку „Пуск“ - S1. Когда кнопка не нажата, напряжение питания +12в через нормально замкнутые контакты S1 по цепочке R12, D3 поступает на инверсный вход DA1.2 и равно около 11в. Так как это напряжение превышает напряжение „пилы“ равное 9в, компаратор запирается, и управляющие импульсы открытия тиристоров не формируются. Для предотвращения аварии и выхода из строя двигателя, в случае если оператор не вывел на «0» регулятор оборотов, в схеме предусмотрен узел разгона C5, R13 служащий для плавного разгона двигателя. В режиме «Пуск», схема работает следующим образом: при нажатии кнопки «Пуск» нормально закрытые контакты размыкаются и конденсатор С5 по цепочке - «земля», R13, - С5 начинает плавно заряжаться и напряжение на отрицательной обкладке конденсатора плавно стремиться к нулю. Одновременно, напряжение на инвертирующем входе DA1.2 плавно возрастает до величины, определяемой напряжением задания, и компаратор начинает вырабатывать управляющие импульсы силовых тиристоров. Время заряда определяется номиналами C5, R13. Если в процессе работы двигателя необходимо изменить его обороты, чтобы избежать резких бросков оборотов - в схеме предусмотрен узел «разгона - торможения» R21, C8, R22. При увеличении (уменьшении) напряжения задания, конденсатор С8 плавно заряжается (разряжается) что предотвращает резкий «наброс» напряжения на инверсном входе усилителя и как следствие предотвращает резкий бросок оборотов двигателя.
Теперь рассмотрим принцип работы регулятора оборотов
.
Регулятор предназначен для поддержания постоянных оборотов двигателя в зоне регули-рования. Регулятор представляет собой дифференциальный усилитель с суммированием двух напряжений: напряжения задания и напряжения обратной связи. Напряжение задания задается резистором RP1 и поступает через фильтр R20, C8, R21, выполняющий одновременно функции узла «разгона - торможения», поступает на инверсный вход регулятора ОУ DA1.3. При увеличении напряжения задания на выходе ОУ DA1.3 линейно уменьшается выходное напряжение.
Выходное напряжение регулятора поступает на инверсный вход компаратора СИФУ DA1.2 где, суммируясь с импульсами пилообразного напряжения, преобразуется в серию прямоугольных импульсов идущих на управляющие электроды тиристоров. При увеличении (уменьшении) напряжения задания увеличивается (уменьшается) и выходное напряжение на выходе силового блока.
На этом графике представлена зависимость оборотов двигателя от напряжения задания.
Значения оборотов двигателя даны для примера.
Делитель напряжения R22, R23 включенный на прямой вход регулятора DA1.3 служит для предотвращения аварии двигателя при обрыве обратной связи (при обрыве обратной связи двигатель идет в разнос).
При включении привода, тахогенератор начинает вырабатывать напряжение, пропорциональное оборотам двигателя. Это напряжение поступает на вход прецизионного детектора DA1.4, DA2.1 собранного по двухполупериодной схеме. Напряжение, снимаемое с выхода точного детектора DA1.4, DA2.1, поступает через фильтр C10, R30, R33 на масштабирующий усилитель обратной связи DA2.2. Усилитель служит для подгонки напряжения обратной связи поступающего с тахогенератора. Напряжение с выхода ОУ DA2.2. поступает как на вход регулятора DA1.3 так и на схему защиты DA2.3.
Резистором RP1 задаются обороты двигателя. При работе двигателя без нагрузки, напряжение на выходе масштабирующего усилителя ниже напряжения на выводе 6 ОУ DA1.3. ≈ +5v, поэтому привод работает как регулятор. При увеличении нагрузки на валу двигателя, уменьшается напряжение, получаемое с тахогенератора и как следствие уменьшение напряжения с выхода, масштабирующего усилителя.
Когда это напряжение будет меньше напряжение на выводе 5 ОУ DA1.3 привод входит в зону стабилизации тока. Уменьшение напряжения на неинвертирующем входе ОУ DA1.3 приводит к уменьшению напряжения на его выходе, а так как он работает на инвертирующий усилитель DA1.2, это приводит к большему углу открытия тиристоров и, следовательно, к увеличению напряжения на якоре двигателя.
СХЕМА ЗАЩИТЫ
Защита от превышения оборотов предназначена для защиты двигателя от аварии, в случае резкого превышения установленных оборотов двигателя. Схема собрана на ОУ DА2.3, включенного по схеме компаратора. На инверсный вход компаратора подается опорное напряжение с делителя R36, R37, RP3. Резистором RP3 устанавливается порог срабатывания защиты. Напряжение с выхода масштабирующего усилителя DA2.2 поступает на прямой вход компаратора защиты DA2.3. При превышении оборотов двигателя выше номинальных, напряжение на прямом входе компаратора превышает порог уставки защиты, определяемой RP3 - компаратор переключиться. Благодаря наличию в схеме положительной обратной связи R38 приводит к «за-щелкиванию» компаратора, а наличие диода VD12 препятствует сбросу компаратора. При срабатывании защиты, напряжение с выхода компаратора защиты (≈ +11v) через диод VD14 поступает на инверсный вход 13 DA1.2 СИФУ, а так как напряжение защиты превышает напряжение «пилы» (= 9v) - происходит мгновенный запрет выдачи управляющих импульсов на управляющие электроды тиристоров. Напряжение с выхода компаратора защиты DA2.3 открывает транзистор VT4, что приводит к срабатыванию реле Р1.1 и зажиганию светодиода VL1 сигнализирующего об аварийной ситуации. Снять защиту можно, только полностью обесточив привод, и, выдержав паузу 5 - 10 секунд вновь включив его.
Силовая часть блока управления.
Схема силовой части представлена ниже
Трансформатор Tr1 предназначен для питания схемы блока управления. Управляемый выпрямитель собран по полумостовой симметричной схеме и содержит два силовых диода D1,D2
и два силовых тиристора Т1, Т2, и защитный диод D3. Обмотка возбуждения питается от своего отдельного трансформатора и выпрямителя.
Если на двигателе отсутствует тахогенератор, то обратную связь, для контроля оборотов, можно выполнить следующим образом:
1. Применить трансформатор тока, включенный в цепь питания управляемого выпрямителя
Если используется трансформатор тока, то перемычку P1 на схеме блока управления поставить
в положение 1-3, это необходимо потому, что при увеличении нагрузки ток якоря будет увеличиваться, следовательно напряжение, снимаемое с трансформатора тока тоже будет увеличиваться, поэтому напряжение обратной связи необходимо подавать на инвертирующий
вывод микросхемы DA1.3. Так же можно поставить стандартный токовый шунт, но только в цепь якоря двигателя, после выпрямителя и снимать сигнал обратной связи с него.
2. Использовать датчик якорного напряжения. Схема приведена ниже.
Датчик якорного напряжения представляет собой фильтр – делитель и подключается непосредственно к клеммам якоря электродвигателя. Настройка привода производиться следующим образом. Резисторы “Задание” и “Масштабирование Uoc” выставляется в среднее положение. Резистор R5 датчика якорного напряжения выводиться в нижнее к “земле” положение. Включаем привод и выставляем напряжение на якоре двигателя примерно 110 вольт. Контролируя напряжение на якоре двигателя, начинаем вращать резистор R5. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь.
Теперь перейдем к конструкции и наладке блока управления.
Блок управления был выполнен на печатной плате (файл печатной платы)

Плата проводом МГТФ соединена с разъемом, для удобства демонтажа при ремонте.
Настройка
На время настройки была собрана силовая часть навесным монтажем, в качестве нагрузки была использована обычная лампа накаливания.
Наладку начинаем с проверки напряжений питания и напряжения питания на операционных усилителях DA1, DA2. Микросхемы желательно ставить в панельки. Потом контролируем осциллограммы в контрольных точках КТ1, КТ2, КТ3 (осциллограммы в этих точках приведены в начале описания СИФУ). Теперь, осциллограф ставим в контрольную точку КТ4. Должны быть пилообразные импульсы, как на осиллограмме выше (кнопка «Пуск» в этот момент должна быть разомкнута). Подстроечным резистором RP1 необходимо выставить размах «пилы» равным 9 вольт, это очень важный момент, так как от него зависит дальнейшая работа схемы. Так как разброс параметров полевых транзисторов бывает весьма значительный, возможно диапазона регулировки RP1 может не хватить, тогда подбором номинала резистора R10 добиться нужного размаха. В контрольной точке КТ3 длительность импульса должна быть 1.5 - 1.8ms, если нет, то подбором резистора R4 (в сторону уменьшения) добиться необходимой длительности.
Вращая регулятор RR1 в контрольной точке КТ5 проконтролировать изменение скважности импульсов от максимума до полного их исчезновения при нижнем положении движка RR1. При этом должна изменятся яркость лампочки подключенной к силовому блоку.
Далее подключаем блок управления к двигателю и тахогенератору. Выставляем регулятором RR1
напряжение на якоре около 40-50 вольт. Резистор RP3 должен быть установлен в среднее положение. Контролируя напряжение на якоре двигателя, начинаем вращать резистор RP3. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь. Для желающих поэкспериментировать: для увеличения жесткости привода можно также увеличить сопротивление R24, увеличив тем самым коэффициент усиления регулятора либо увеличить резистор R32.
Если используется обратная связь по току якоря двигателя.
Для этого, как говорилось выше, необходим трансформатор тока, включенный в цепь питания
управляемого выпрямителя. Схема калибровки трансформатора тока дана ниже. Подбором резистора получить на выходе трансформатора переменное напряжение ≈ 2 ÷ 2.5v. Мощность нагрузки RN1 должна соответствовать мощности двигателя. 
Внимание! Трансформатор тока без нагрузочного резистора не включать.
Подключаем трансформатор тока к цепи обратной связи P1 и P2. На время настройки «Регулятора» желательно выпаять диод D12, чтобы исключить ложное срабатывание защиты.
Осциллограммы в контрольных точках КТ8, КТ9, КТ10 должны быть как на рисунке ниже.
Дальнейшая настройка такая же как и в случае с использования тахогенератора.
Если используется обратная связь по напряжению якоря двигателя.
Как отмечалось выше, можно применить обратную связь по якорному напряжению, для этого собирается датчик якорного напряжения. Настройка блока управления производиться следующим образом. Резисторы “Задание” и “Масштабирование Uoc” выставляется в среднее положение. Резистор R5 датчика якорного напряжения выводиться в нижнее к “земле” положение. Включаем привод и выставляем напряжение на якоре двигателя примерно 110 вольт. Контролируя напряжение на якоре двигателя, начинаем вращать резистор R5. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь.
Данный блок управления изготавливался для расточного станка. Вот фото этого монстра

На этом станке вышел из строя электромашинный усилитель, который и управлял двигателем постоянного тока перемещения стола.
Вот такой электромашинный усилитель.
Заместо него и делался данный блок управления.
Вот фото самого двигателя постоянного тока.
Блок управления был собран на изоляциоонном основани, где размещены все основные элементы.
Силовые диоды и тиристоры установлены на теплоотводы. Так же была сделана панель с разъемами, куда были выведены сигналы с контрольных точек схемы. Это делалось для удобство настройки и ремонта непосредственно на станке.
Вот смонтированный блок управления в силовом шкафу станка


На другой стороне силового шкафа был установлен маленький пульт управления.
На нем расположены:
-тумблер включения блока
-тумблер режима работы. Так как для установочных перемещений стола станка, точный контроль и стабилизация оборотов не нужны, то на это время цепь обратной связи шунтируется.
-ручки регулировки количества оборотов. Было поставлено два переменных резистора, один для грубой регулировки, второй - многооборотный - для точной установки нужных оборотов при черновой и чистовой расточке детали.
Кому интересно, ниже представлено видео работы станка. Сперва, показывается расточка отверстия в стальной плите толщиной 20мм. Потом показывается с какой частотой вращается винт подачи стола станка. С этой скорость подается деталь на резец, а такую частоту вращения подающего винта обеспечивает двигатель постоянного тока, для которого, собственно, все это и делалось.
Блок управления показал себя хорошо, сбоев и аварий не было.
Электродвигатели это очень распространенный объект управления в различных устройствах и технических комплексах. Без них наша современная жизнь была бы не такой уж и современной. Они используются во многих сферах потребительской техники и промышленной автоматизации, начиная от небольших двигателей, вращающих барабан стиральной машинки, и заканчивая огромными махинами, приводящими в движение заводские конвейеры и шахтные подъемники.
Традиционно электродвигатели делят на двигатели постоянного тока и двигатели переменного тока . Последние в силу бурного развития научно-технической мысли, которая предлагает более совершенные алгоритмы векторного управления и довольно дешевые и удобные в использовании частотники, приобретают все большую популярность. Но двигатели постоянного тока (ДПТ) тоже имеют свои преимущества, и они еще долгое время будут крутить свои валы в режиме нещадной эксплуатации в различных технических областях, поэтому сегодня речь пойдет именно о ДПТ, точнее об управлении коллекторными электродвигателями постоянного тока.
Такие агрегаты были первыми двигателями, нашедшими широкое применение в промышленном оборудовании, и их до сих пор используют там, где требуется невысокая стоимость конечного устройства, простая установка и управление. На роторе этих двигателей располагается обмотка (1 на рисунке 1), а на статоре — электромагниты (2 на рисунке 1). Щеточные контакты (3 на рисунке 1), которые устанавливаются по окружности вала ротора, применяются для переключения полярности напряжения, прикладываемого к обмотке ротора. Они же создают основную проблему эксплуатации коллекторного ДПТ — ненадежность, поскольку претерпевают сильный износ и требуют периодической замены. Также между щетками и коммутаторными контактами в ходе работы возникают искры, что может привести к возникновению сильных электромагнитных помех. Кроме того, при неправильной эксплуатации всегда имеется риск создать электрическую дугу в коллекторе или, как еще это называют, круговой огонь. В этом случае якорь двигателя гарантированно отживает свой срок.

Рисунок 1 - двигатель постоянного тока
Сегодня получили распространение две схемы управления двигателем такого типа: генератор-двигатель (Г-Д) и преобразователь-двигатель (тиристорный ТП-Д и транзисторный ТрП-Д).

Рисунок 2 - силовые схемы электроприводов постоянного тока а) Г-Д, б) ТП-Д или ТрП-Д
На рисунке 2 показаны две схемы управления ДПТ с независимым возбуждением. В обоих случаях управление угловой скоростью и моментом по абсолютному значению и направлению осуществляют путем регулирования напряжения на якоре двигателя. Напряжение на якоре двигателя Д в системе Г-Д регулируют путем изменения силы тока в обмотке возбуждения генератора (ВГ). Для этой цели служит возбудитель генератора ВГ, в качестве которого используют силовые магнитные усилители (системы МУ-Г-Д, хотя это прошлый век, и в современных системах такого не встретишь), тиристорные (ТВ-Г-Д) или транзисторные (ТрВ-Г-Д) преобразователи. В системах ТП-Д напряжение на якоре двигателя регулируют путем фазового управления коммутацией тиристоров, а в системах ТрП-Д путем изменения скважности пульсирующего питающего напряжения, то есть с помощью широтно-импульсной модуляции (ШИМ).
Популярность Г-Д, а также ТП-Д с каждым годом падает из-за их громоздкости, аппаратной избыточности и сложности в управлении, по сути, они в основном применяются в промышленности для управления крупными двигателями.А ТрП-Д все чаще применяется в различных технических системах благодаря своей простоте, дешевизне и удобству управления. Также за счет обилия на рынке различных моделей MOSFET и IGBT-транзисторов и драйверов управления их затворами системы ТрП-Д применяются для управления как маломощными, так и крупными двигателями. Думаю, это стоит того, чтобы познакомиться с такими системами ближе.
Итак, сердцем ТрП-Д является широтно-импульсный преобразователь (ШИП), который состоит из четырех транзисторов (рисунок 3). В диагональ такого транзисторного моста включается нагрузка, то есть якорь двигателя. Питается ШИП от источника постоянного тока.

Рисунок 3 - схема транзисторного ШИП
Есть несколько способов управления ШИП по цепи якоря. Самый простой - это симметричный способ . При таком управлении в состоянии переключения находятся все четыре транзистора, и выходное напряжение ШИП представляет собой знакопеременные импульсы, длительность которых регулируется входным сигналом. Сам принцип переключения показан на рисунке 4. Логично предположить, если относительная продолжительность включения будет равна 50%, то на выходе ШИП получим 0 В. Преимуществом симметричного способа является простота реализации, но двухполярное напряжение на нагрузке, вызывающее пульсации тока в якоре, является его недостатком. По сути, он используется для управления маломощными ДПТ.

Рисунок 4 - симметричный способ управления ДПТ
Более совершенным является . Как мы видим на рисунке 5, он обеспечивает на выходе ШИП однополярное напряжение. В данном случае переключаются лишь два транзистора Т3 и Т4, при этом Т1 постоянно открыт, а Т2 постоянно закрыт. Для того, чтобы среднее напряжение на выходе ШИП было равно нулю, достаточно чтобы нижний переключающийся транзистор оставался в закрытом состоянии. Такой подход тоже не очень хорош тем, что верхние ключи загружены по току больше, чем нижние. При больших нагрузках это может привести к перегреву и выходу транзисторов из строя.

Рисунок 5 - несимметричный способ управления ДПТ
Но и с этим недостатком справились, придумав способ поочередного управления (рисунок 6). Здесь как при движении как в одну сторону, так и в другую будут переключаться все четыре транзистора. Обязательным условием является нахождение в противофазе управляющих напряжений транзисторов Т1 и Т2 для одной группы и Т3 и Т4 для другой.

Рисунок 6 - поочередный способ управления ДПТ
Из рисунка видим, что при определенном знаке сигнала задания на скорость длинные импульсы с разницей в полпериода подаются на диагонально противоположные ключи (в данном случае Т1 и Т4). Соответственно, также со сдвигом полпериода на ключи противоположной диагонали подаются короткие импульсы. Таким образом, нагрузка подключается к источнику во время отсутствия коротких импульсов, а во время их присутствия закорачивается либо на питание, либо на землю. При изменении знака задания транзисторы управляются противоположным образом.









